

CCD视觉定位功能在激光焊锡产线的应用价值
CCD视觉定位功能在激光焊锡产线的应用价值
随着电子制造行业对精密加工需求的不断提升,自动激光焊锡技术因其高精度、非接触性和热影响小等优势,逐渐成为微电子焊接领域的主流工艺。在这一技术中,焊点的精确定位是实现高质量焊接的核心前提。本文将从自动激光焊锡机的定位方式入手,重点解析CCD视觉定位技术的原理及其在自动化产线中的独特价值。

一、自动激光焊锡机的常见定位方式
自动激光焊锡机的定位系统直接影响焊接精度和效率,目前主流的定位方式可分为以下几类:
1. 机械定位
机械定位是通过预设的机械结构(如导轨、丝杠、伺服电机等)控制焊枪或工件的运动轨迹,实现定位。其优点是稳定性高、成本较低,但缺点也较为明显:
▪ 灵活性差:需预先编程固定路径,难以适应复杂多变的焊点布局。
▪精度受限:机械磨损或装配误差会累积,长期使用后定位精度下降。
▪适用场景单一:仅适合大批量、标准化产品的重复性加工。
2. 传感器定位
通过光电传感器、红外传感器或激光测距仪等设备实时检测工件位置,动态调整焊枪坐标。此类方式在动态响应速度上优于纯机械定位,但仍存在局限:
▪环境敏感:易受车间粉尘、油污或光线干扰,导致误判。
▪适用范围窄:仅能检测特定特征(如边缘或高度),无法处理复杂形状或微小焊点。
3. CCD视觉定位
基于计算机视觉技术,通过高分辨率CCD相机采集工件图像,结合图像处理算法提取特征点坐标,并引导激光焊枪精准定位。CCD视觉定位的优势使其成为当前自动化产线的首选方案,下文将重点分析。
二、CCD视觉定位的技术原理与核心优势
1. 技术原理
CCD(Charge-Coupled Device,电荷耦合器件)是一种光电转换元件,可将光信号转换为电信号。在自动激光焊锡机中,CCD视觉系统的工作流程如下:
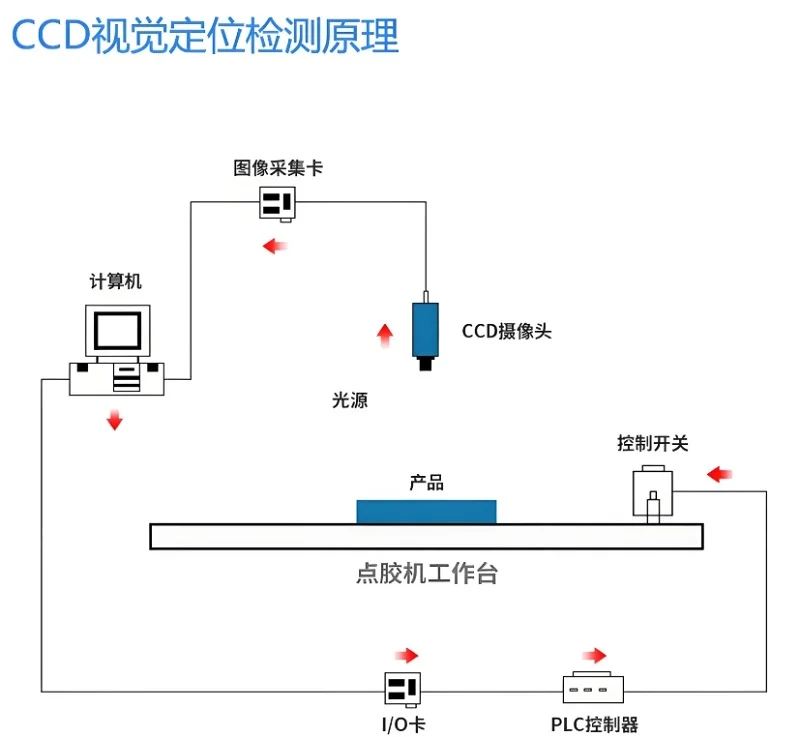
① 图像采集:通过工业相机拍摄工件的高清图像。
② 图像处理:利用算法(如边缘检测、模板匹配、深度学习)提取焊点位置、角度等信息。
③ 坐标转换:将图像坐标系与机械运动坐标系对齐,生成焊枪的运动指令。
④ 实时反馈:焊接过程中持续监控位置偏移,动态调整焊枪路径。
2. CCD视觉定位的四大核心优势
(1) 高精度与高适应性
CCD相机的像素分辨率可达微米级,配合亚像素算法,定位精度可控制在±5μm以内,满足精密电子元件(如芯片、FPC柔性电路)的焊接需求。此外,视觉系统可通过软件快速适应不同产品型号,无需重新设计机械结构,显著提升产线柔性。
(2) 复杂环境下的鲁棒性
通过多光源补偿(如环形光、同轴光)和图像增强算法,CCD系统能有效克服反光、阴影、表面纹理差异等问题。例如,在焊接带有镀层的金属件时,系统可自动调节曝光参数,确保特征点清晰可见。
(3) 智能化纠错能力
与传统定位方式相比,CCD系统具备实时反馈与纠偏功能。例如,当工件因振动或热变形发生偏移时,系统可立即识别并修正焊枪路径,避免批量性不良品产生。
(4) 多任务协同能力
在高端产线中,CCD视觉系统可与其他模块(如AOI自动光学检测、机械臂)联动,实现“定位-焊接-检测”一体化流程。例如,焊接完成后,相机可直接对焊点质量进行初步筛查,减少后续质检环节的人力投入。
三、CCD视觉定位在自动化产线中的应用价值

1. 提升生产效率
传统机械定位需频繁更换治具,而CCD系统通过软件切换程序即可适配新产品,换线时间缩短70%以上。以手机主板焊接为例,一条产线可同时处理多款机型,显著降低设备闲置率。
2. 降低综合成本
减少人工干预:CCD系统可自动识别工件位置,无需人工校准,降低对熟练工人的依赖。
降低废品率:动态纠偏功能将焊接不良率从传统方式的3%~5%降至0.5%以下。
延长设备寿命:非接触式定位减少机械部件的磨损,降低维护成本。
3. 推动智能化升级
随着工业4.0的推进,CCD视觉定位成为实现数字化工厂的关键技术。例如,通过云端数据平台,不同产线的定位参数可实时共享,优化生产工艺;结合AI算法,系统还能自主学习焊点特征,进一步提升定位效率。

 浏览器自带分享功能也很好用哦~
浏览器自带分享功能也很好用哦~




188金宝搏官网
0755-23721845
189-2607-0238
深圳市宝安区石岩街道创维创新谷5#A栋1楼105
